C 재운송을 위해 로봇 잠금
다음 지침은 랙 설치 후 재운송하기 전에 SL150 로봇손을 잠그는 프로세스를 정의합니다.
주의:
올바르게 잠금 설치가 이루어지지 않으면 운송 중 심각한 고장이 발생할 수 있습니다.- 작업 1 라이브러리 전원 차단
-
-
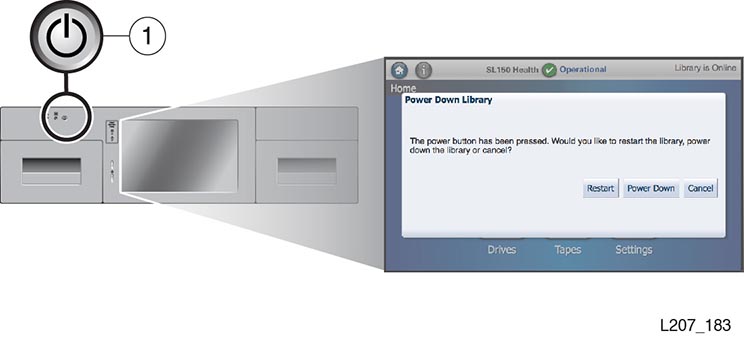
SL150 라이브러리의 전면에 있는 전원 버튼을 찾습니다.
-
전원 버튼을 눌렀다 놓습니다.
터치 스크린 패널에 전원 차단 대화 상자가 나타납니다(그림 C-1 참조).
-
터치 스크린에서 Power Down 버튼을 누릅니다.
-
터치 스크린 패널의 지침에 따라 제거할 로봇의 위치를 지정합니다.
-
라이브러리에서 전원 차단 프로세스가 완료되면 작업 2를 수행합니다.
그림 범례:
1 - 전원 버튼
-
- 작업 2 로봇손 위치 확인
-
-
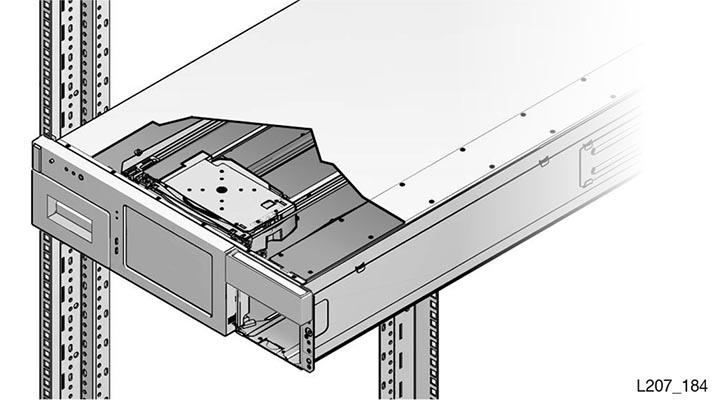
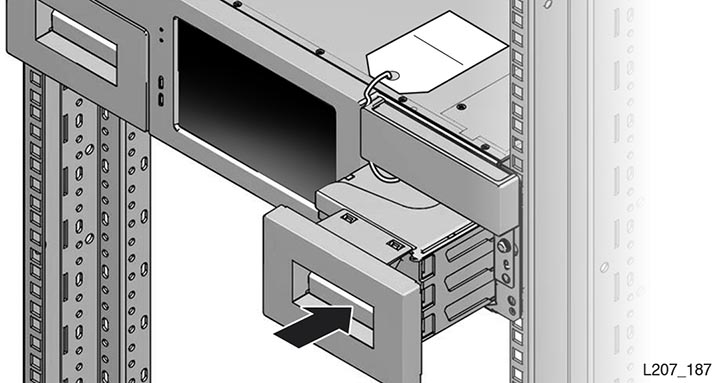
기본 모듈에서 오른쪽 카트리지 매거진을 제거합니다(필요한 경우 "카트리지 매거진 제거" 참조).
-
로봇손의 위치가 라이브러리의 천장 및 전면과 반대 방향인지 확인합니다(그림 C-2 참조).
-
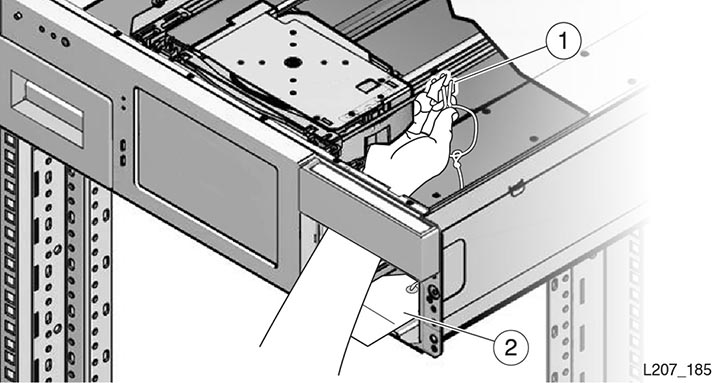
- 작업 3 운송 클립 설치
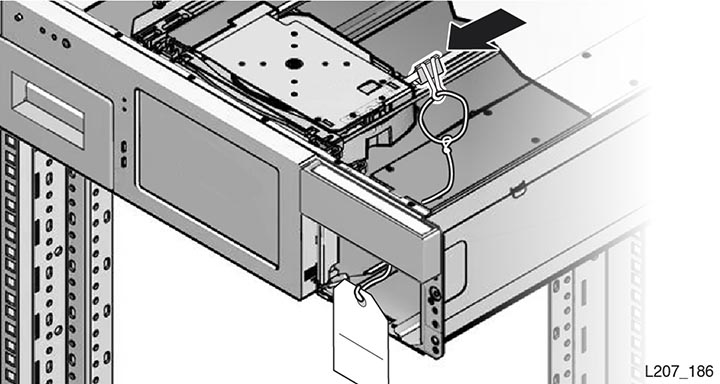
- 작업 4 마무리
-
-
줄과 지침 태그를 메일슬롯과 전면 컨트롤 패널의 오른쪽 사이에 오도록 하고 기본 모듈의 윗면에 올립니다(그림 C-5 참조).
-
기본 모듈에서 오른쪽 매거진을 교체하고 매거진이 단단히 장착되었는지 확인합니다.
-