15 Maintenance de la bibliothèque
-
Entrée dans la bibliothèque sans la porte de sécurité de service en place
-
Utilisation du commutateur d'arrêt d'urgence de la robotique
Mise hors tension de la bibliothèque
Attention :
Si vous mettez la bibliothèque hors tension sans effectuer la procédure suivante, vous risquez d'endommager l'équipement ou la cartouche, ou de perdre des données.-
Assurez-vous que toutes les demandes adressées à la bibliothèques sont terminées.
-
Placez la bibliothèque et les lecteurs hors ligne.
-
Assurez-vous que les lecteurs sont vides en vérifiant l'état du lecteur à l'aide de SLC (voir la section Affichage de rapports sur la bibliothèque et les périphériques à l'aide de l'utilitaire de rapports).
-
Ouvrez les portes arrière de la bibliothèque.
-
Localisez l'unité de distribution de courant (PDU) dans l'angle inférieur droit à l'arrière de la bibliothèque et placez l'interrupteur Marche/Arrêt du système sur la position Arrêt (0). Si la bibliothèque possède une configuration d'alimentation 2N, vous devez mettre hors tension les deux PDU.
Pour plus d'informations sur les PDU, reportez-vous au SL8500 Overview and Planning Guide.
Mise sous tension de la bibliothèque
-
Vérifiez que les porte d'accès avant sont fermées et verrouillées
Remarque :
Si vous ne voulez pas mettre sous tension les robots, les CAP et les ascenseurs, laissez les portes d'accès ouvertes. -
Placez l'interrupteur Marche/Arrêt sur la position Marche (ON).
Si la bibliothèque possède une configuration d'alimentation 2N, vous devez mettre sous tension les deux PDU.
Entrée dans la bibliothèque sans la porte de sécurité de service en place
Remarque :
L'ouverture de la porte d'accès sans la porte de sécurité en place arrêtera toutes les opérations de la bibliothèque. Quand la bibliothèque revient en ligne, elle lance un audit complet. Voir aussiFonctionnement de la porte de sécurité de service.-
Respectez toutes les précautions de sécurité (voir la section Précautions de sécurité lors de l'entrée dans la bibliothèque).
-
Mettez la bibliothèque hors ligne (voir la section Mise hors ligne de la bibliothèque).
-
Déverrouillez et ouvrez la porte d'accès avant. Verrouillez l'ouverture de la porte d'accès et retirez la clé.
-
Si nécessaire, déplacez les robots du chemin en commençant par le rail du bas. Evitez d'endommager les composants mécaniques ou électroniques du robot. Le robot doit se déplacer librement. Ne forcez pas le robot si le mouvement est restreint.
-
Avant de quitter la bibliothèque, vérifiez qu'aucun élément n'est desserré et qu'il n'y a plus personne.
-
Fermez les portes avec le loquet.
-
Verrouillez les portes et conservez la clé.
-
Mettez la bibliothèque en ligne (reportez-vous à la section Mise en ligne de la bibliothèque).
Précautions de sécurité lors de l'entrée dans la bibliothèque
AVERTISSEMENT :
Pour empêcher la fermeture accidentelle de la porte, verrouillez l'ouverture de la porte d'accès et retirez la clé.
-
Vérifiez que la bibliothèque est hors ligne. N'entrez pas dans la bibliothèque et ne déplacez pas les robots si vous avez des raisons de croire que ces derniers sont sous tension.
-
Ne tentez pas de remplacer les périphériques de sécurité électriques ou mécaniques dans la bibliothèque.
-
Informez la personne à proximité de la bibliothèque pour lui indiquer que vous allez entrer dedans.
-
Repérez les déclencheurs mécaniques de la porte (poignées jaunes à l'intérieur des portes d'accès). Si les portes se referment alors que vous êtes dans la bibliothèque, appuyez sur le déclencheur mécanique pour déverrouiller et ouvrir la porte.
-
Tant que vous êtes à l'intérieur de la bibliothèque, laissez les deux portes d'accès avant ouvertes.
-
Gardez en mémoire les restrictions physiques de la bibliothèque. Veillez à ne pas vous cogner contre les baies ou à y coincer des vêtements (l'espace libre dans le passage n'est que de 0,4 mètre).
Utilisation du commutateur d'arrêt d'urgence de la robotique
Le commutateur ERS (Emergency Robotics Stop, arrêt d'urgence de la robotique) met totalement hors tension les robots.
Dans l'hypothèse peu probable où quelqu'un serait coincé dans la bibliothèque et où le système se remettrait sous tension, des voyants clignoteraient pendant 30 secondes avant que le robot ne commence à se déplacer. Cela laisse suffisamment de temps à toute personne à l'extérieur de la bibliothèque d'appuyer sur le commutateur ERS (arrêt d'urgence de la robotique).
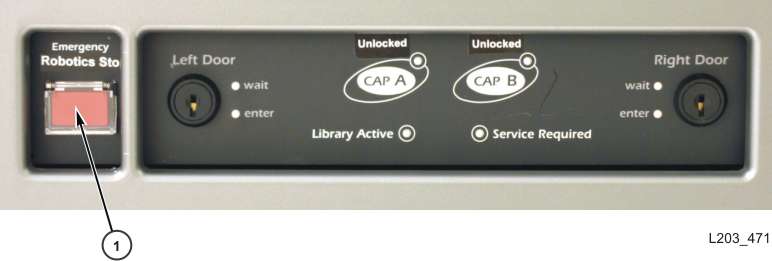
-
Commutateur d'arrêt d'urgence de la robotique (ERS)
Montage ou démontage manuels d'une cartouche
Reportez-vous à la documentation relative au lecteur avant de monter manuellement une cartouche.
Attention :
Vos mains doivent rester à distance des composants de charge mécaniques et électroniques du lecteur.-
Enregistrez l'ID de volume, l'emplacement de la cartouche et l'emplacement du lecteur fournis par le logiciel de gestion de la bibliothèque.
-
Localisez le lecteur (reportez-vous à Affichage de rapports sur la bibliothèque et les périphériques à l'aide de l'utilitaire de rapports).
-
Localisez la cartouche (reportez-vous à Localisation des cartouches).
-
Orientez la cartouche de sorte que le moteur du hub soit tourné vers le bas et l'étiquette d'ID de volume soit face à vous.
-
Enfoncez la cartouche dans le lecteur. Ne forcez pas la cartouche. Si vous sentez une résistance lors de l'insertion de la cartouche, assurez-vous que celle-ci est du type approprié pour le lecteur.
-
Pour démonter le lecteur, appuyez sur l'interrupteur UNLOAD à l'avant du lecteur.
Si la cartouche n'est pas éjectée, reportez-vous à la documentation relative au lecteur.
Fonctionnement de la porte de sécurité de service
Vous pouvez utiliser SLC pour surveiller le statut de la porte de sécurité (voir la section Affichage du statut et des propriétés des périphériques).
La porte de sécurité est une barrière coulissante qui ferme temporairement la zone gauche ou droite comprise entre la porte avant et l'arrière de l'assemblage de l'ascenseur. Les représentants du support technique peuvent activer la porte de sécurité de service avec une clé de maintenance. Quand la porte de sécurité est en place, un représentant du support technique peut ouvrir la porte avant pour accéder à un robot en panne sans mettre la bibliothèque hors ligne.
La bibliothèque continue de fonctionner et de traiter les demandes des hôtes. La bibliothèque met en attente les demandes de montage des emplacements situés à côté ou derrière la porte de sécurité jusqu'à ce que le représentant du support technique ait terminé. Une fois la porte d'accès fermée et verrouillée, la porte de sécurité de service se déplace vers le centre de la bibliothèque. Les robots reprennent ensuite leurs activités.
Accès à la zone de maintenance de gauche
Avant d'activer la porte de sécurité, le représentant du support technique doit mettre l'ascenseur de gauche et les CAP de chargement en masse de gauche hors ligne à l'aide de SLC. Après avoir terminé l'activité de maintenance, le représentant du support technique doit remettre l'ascenseur de gauche et les CAP de chargement en masse de gauche en ligne.
Accès à la zone de maintenance de droite
Avant d'activer la porte de sécurité, le représentant du support technique doit mettre l'ascenseur de droite et les CAP de rotation ou de chargement en masse de droite hors ligne à l'aide de SLC. Après avoir terminé l'activité de maintenance, le représentant du support technique doit remettre l'ascenseur de droite et les CAP en ligne.