1 라이브러리 모듈 및 하드웨어 구성요소
라이브러리 모듈
-
기본 모듈 — 라이브러리당 하나씩 필요합니다.
-
DEM(드라이브 확장 모듈) — 기본 모듈의 왼쪽에만 최대 1개입니다.
-
CEM(카트리지 확장 모듈) — 라이브러리의 왼쪽에 4개, 오른쪽에 4개로 최대 8개입니다.
-
AEM(액세스 확장 모듈) — 라이브러리 양쪽에 하나씩 최대 2개입니다. AEM은 기본 모듈의 왼쪽에 직접 설치할 수 없습니다.
-
PEM(장착 확장 모듈) — 중복 전자 부품 지원에 대한 AEM을 대체합니다. PEM은 라이브러리의 양쪽에 하나씩 쌍으로 설치해야 합니다. PEM은 변환된 CEM입니다.
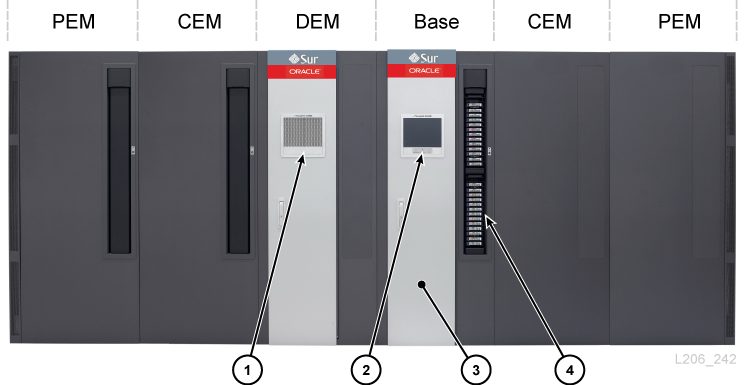
그림 범례
-
뚫린 창
-
운영자 패널
-
서비스 도어
-
CAP(열림)
기본 모듈
모든 라이브러리에는 하나의 기본 모듈이 필요합니다. 독립형 기본 모듈은 SL3000 라이브러리의 가능한 가장 작은 구성입니다.
-
205-431 카트리지 용량(물리적 용량 계산 참조).
-
8(표준), 16 또는 24개 드라이브 슬롯.
-
뚫린 창(표준), 창 스토리지 배열 또는 운영자 패널.
-
CAP(표준). 회전식 CAP(카트리지 액세스 포트)를 참조하십시오.
기본 모듈의 전면에는 단일 CAP, 서비스 도어, LED가 있는 전면 패널 및 뚫린 창 또는 선택적 운영자 패널 또는 창 스토리지 배열이 포함됩니다. 기본 모듈의 후면에는 전자 부품 모듈, PDU(전원 분배 장치), DC 전원 공급기, 테이프 드라이브 및 2개의 1u 랙 공간이 포함됩니다.
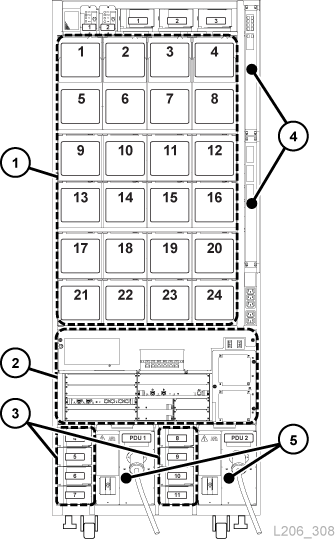
그림 범례
-
테이프 드라이브
-
전자 부품 모듈
-
드라이브 DC 전원 공급기
-
이더넷 스위치(선택사항)
-
전원 분배 장치
DEM(드라이브 확장 모듈)
DEM은 기본 모듈의 왼쪽(라이브러리의 전면에서 볼 때)에 연결됩니다. DEM은 테이프 드라이브의 수를 확장하고 추가 카트리지 스토리지를 제공합니다. DEM은 라이브러리당 하나만 있을 수 있습니다.
-
153-522 카트리지 용량(물리적 용량 계산 참조).
-
8(표준), 16, 24 또는 32개 드라이브 슬롯.
-
뚫린 창(표준), 창 스토리지 배열 또는 운영자 패널.
-
CAP(선택사항), 회전식 CAP(카트리지 액세스 포트)를 참조하십시오.
DEM의 전면에는 서비스 도어, 선택적 CAP 및 뚫린 창 또는 선택적 운영자 패널(기본 모듈에 없는 경우) 또는 창 스토리지 배열이 포함됩니다. DEM의 후면에는 테이프 드라이브, PDU, DC 전원 공급기 및 2개의 1u 랙 공간이 포함됩니다.
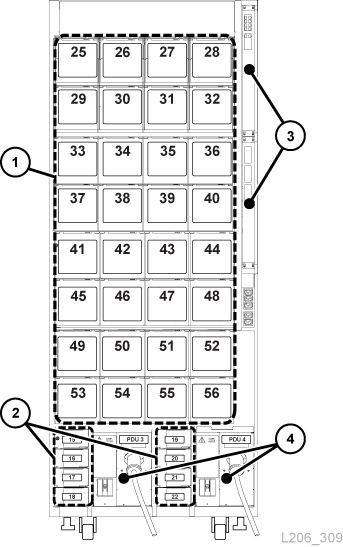
그림 범례
-
테이프 드라이브
-
드라이브 DC 전원 공급기
-
이더넷 스위치(선택사항)
-
전원 분배 장치
CEM(카트리지 확장 모듈)
CEM은 추가 카트리지 스토리지를 제공합니다. 이 모듈 내에는 테이프 드라이브가 존재하지 않습니다. 라이브러리의 끝에 있는 CEM은 PEM으로 변환할 수 있습니다(PEM(장착 확장 모듈) 참조). 단일 라이브러리에서 최대 8개의 CEM이 지원됩니다. 첫번째 CEM은 기본 모듈의 오른쪽, 두번째 CEM은 DEM/기본 모듈의 왼쪽, 세번째 CEM은 오른쪽, 네번째 CEM은 왼쪽 등으로 설치해야 합니다. 이 교차 방식은 라이브러리 성능을 극대화합니다.
-
438-620 카트리지 용량(물리적 용량 계산 참조).
-
CAP(선택사항) 회전식 CAP(카트리지 액세스 포트)를 참조하십시오.
-
기본 모듈 및 DEM의 왼쪽이나 오른쪽에 배치됩니다.
-
중앙선의 각 양쪽에 최대 4개의 CEM이 가능합니다(총 8개).
AEM(액세스 확장 모듈)
AEM에는 최대 234개의 카트리지를 대량 로드 및 언로드하는 데 사용되는 큰 카트리지 액세스 도어가 있습니다. 또는 AEM이 두 개 있는 라이브러리는 중복 로봇 기술 기능을 지원합니다(로봇 기술 참조). 슬라이딩 안전 도어는 결함이 있는 로봇을 차단함으로써 라이브러리가 온라인 상태인 동안 서비스 담당자는 사용 안함으로 설정된 로봇에 액세스할 수 있습니다.
주:
AEM 및 PEM은 동일 라이브러리에 설치할 수 없습니다.-
라이브러리의 양쪽 끝에 설치해야 합니다. AEM은 기본 모듈의 왼쪽에 직접 설치할 수 없습니다. 둘 사이에 모듈이 있어야 합니다.
-
단일 AEM은 대량 로드 기능만 지원합니다. 추가적인 104개 스토리지 슬롯을 위해서는 왼쪽에 단일 AEM을 설치해야 합니다(물리적 용량 계산 참조).
PEM(장착 확장 모듈)
PEM은 중복 로봇 기술 구성의 작업 로봇에 대한 액세스를 차단하지 않고 결함 로봇을 "장착"하는 데 사용되는 변환된 CEM입니다(로봇 기술 참조). PEM에서 사용 안함으로 설정된 로봇에 대한 유지 보수를 수행하면 라이브러리 작동이 중단됩니다.
파킹 공간으로 인해 PEM에서 6열의 카트리지 배열에 액세스하지 못하게 됩니다(전면과 후면 벽에 3개씩). 액세스할 수 없는 배열을 제거할 필요는 없습니다. 모듈은 언제라도 CEM으로 복원할 수 있습니다.
-
230-312 카트리지 용량(물리적 용량 계산 참조).
-
왼쪽 PEM에만 선택적 CAP을 가질 수 있습니다.
-
라이브러리 양쪽 끝에 설치해야 합니다.
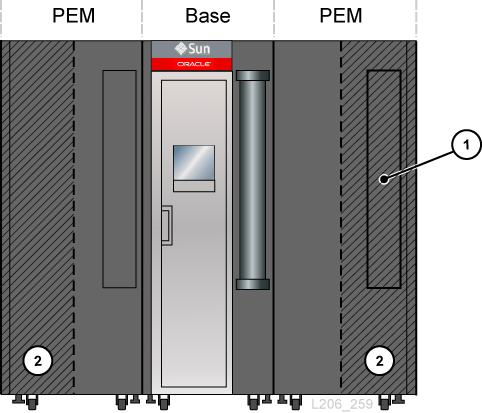
그림 범례
-
액세스할 수 없는 CAP 영역
-
로봇 파킹 영역(액세스할 수 없는 카트리지 슬롯)
하드웨어 구성요소
전자 부품 컨트롤 모듈
ECM(전자 부품 컨트롤 모듈)은 전자 부품 컨트롤, 로봇 및 드라이브 컨트롤, 호스트 연결을 담당합니다. ECM은 기본 모듈 후면에 있습니다(그림 1-2 참조). 기본 컨트롤러 카드는 HBCR(라이브러리 컨트롤러) 및 HBT(드라이브 컨트롤러)입니다.
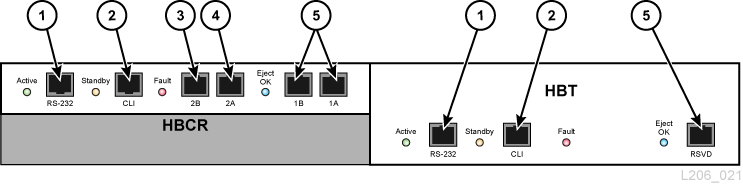
그림 범례
-
직렬 포트(예약됨)
-
직렬 포트(CLI용 CSE 포트)
-
기본 이더넷 포트
-
이중 TCP/IP 이더넷 포트
-
이더넷 포트(예약됨)
주:
ECM에는 광 섬유 인터페이스 연결을 위한 선택적 MPU2 카드(2Gb) 또는 PUA2 카드(8Gb)가 제공됩니다. 이 카드는 그림에 보이지 않지만 HBCR 카드의 아래쪽에 설치되어 있습니다.명령줄 인터페이스
CLI(명령줄 인터페이스)는 오라클 고객 지원 센터에서 라이브러리를 구성하고 진단하는 데 사용할 수 있습니다. 서비스 담당자는 다음 중 하나를 사용하여 전자 부품 제어 모듈을 통해 CLI에 액세스할 수 있습니다.
-
HBCR 카드(RS-232)의 직렬 포트 연결 및 HyperTerminal 연결로 명령 입력
-
HBCR 카드의 이더넷 포트 연결(포트 1A, 2A 또는 2B) 및 보안 셸(PuTTY)로 명령 입력
중복 전자 부품
선택 사항인 중복 전자 부품(Redundant Electronics, RE) 기능은 HBCR 컨트롤러 카드에 대한 페일오버 보호를 위해 사용할 수 있습니다. RE 기능을 사용할 경우 각 라이브러리에는 2개의 HBCR 컨트롤러 카드가 있습니다. 활성 라이브러리 컨트롤러에서 오류가 발생할 경우 라이브러리 및 호스트의 작업 중단을 최소화하면서 작업이 대기 라이브러리 컨트롤러로 자동으로 전환됩니다.
RE는 호스트에 대한 직접 FC-SCSI 연결을 사용하는 라이브러리에 사용할 수 없습니다.
자세한 내용은 SL3000 사용 설명서를 참조하십시오.
로봇 기술
각 라이브러리에는 1개(표준) 또는 2개의 로봇(중복 로봇 기술 옵션)이 있을 수 있습니다. 로봇은 CAP 또는 슬롯에 카트리지를 검색 및 삽입하고 테이프 드라이브에서 카트리지를 마운트/마운트 해제합니다.
로봇은 라이브러리의 후면 벽에 있는 두 레일을 따라 이동합니다. 한 레일은 라이브러리의 상단에 있고 다른 레일은 바닥에 연결됩니다. 상단 레일에 있는 2개의 구리선은 전원 및 로봇과 라이브러리 컨트롤러(HBCR) 카드 사이의 신호 경로를 제공합니다. 전원은 +48 VDC 1200W 로드 공유 공급기에서 제공됩니다(제 4 장 전원 및 냉각 참조).
로봇에는 라이브러리 초기화 중 각 모듈에서 구성 블록을 읽고 CAP 입력 및 감사 중 카트리지의 볼륨 일련 번호(VOLSER)를 식별하는 바코드 스캐너가 포함되어 있습니다.
회전식 CAP(카트리지 액세스 포트)
CAP는 2개의 이동식 13슬롯 매거진이 있는 수직 장착 회전 실린더입니다.
-
기본 모듈에는 CAP이 표준으로 제공됩니다.
-
DEM 및 CEM에는 모듈당 하나의 선택적 CAP이 있을 수 있습니다. 왼쪽 PEM에만 CAP을 포함할 수 있습니다.
-
라이브러리당 최대 10개의 회전식 CAP이 있을 수 있습니다.
-
각 CAP에는 잠금 해제 표시기가 있는 키패드 및 CAP을 열기 위한 버튼이 있습니다.

그림 범례
-
CAP(닫힘)
-
설치된 CAP 없음
-
CAP(열림)
-
키패드
대량 로드 카트리지 액세스 포트(AEM)
AEM을 통해 라이브러리 작업 중단 없이 최대 234개의 카트리지를 넣고 꺼낼 수 있습니다. 대량 로드 기능을 지원하려면 라이브러리에 AEM 하나만 필요합니다(AEM(액세스 확장 모듈) 참조).
지원되는 테이프 드라이브
-
StorageTek T 시리즈(T9840C 및 D)
-
StorageTek T 시리즈(T10000A, B, C 및 D)
-
HP LTO 세대 3, 4, 5 및 6
-
IBM LTO 세대 3, 4, 5, 6 및 7
주:
SL3000 라이브러리에서 테이프 드라이브를 온라인으로 두려면 동적 World Wide Name 기능을 지원해야 합니다.대부분의 드라이브는 동일 제품군의 이전 세대 테이프 드라이브에서 기록한 데이터를 읽을 수 있습니다. 따라서 보증 기간 이내라면 기존 카트리지를 사용할 수 있습니다.
자세한 내용은 Oracle 웹 사이트의 테이프 드라이브 섹션(http://www.oracle.com/us/products/servers-storage/storage/tape-storage/overview/index.html)을 참조하십시오.
암호화 가능 테이프 드라이브
-
StorageTek T10000 A, B, C, D
-
StorageTek T9840 D
-
HP LTO 4, 5, 6세대
-
IBM LTO 4, 5, 6, 7세대
자세한 내용은 테이프 드라이브 암호화를 참조하십시오.