C つまみねじタイプのロボットロックの固定
ロボットの妨げとなる可能性のある保守作業の前に、ロボットロックを固定します。つまみねじタイプのロックのあるロボットとコントローラアセンブリがある場合、この付録の手順を使用して、基本モジュールの上部にあるカバーにロボットを駐機して、ロボットをロックします。
ロボットを駐機する
-
まだライブラリの電源を切断していない場合は、リモートユーザーインタフェースまたはローカルのオペレータパネルを使用して行います。
-
「Power Down Library」確認ダイアログが表示されたら、「Prepare the Robot for removal before the library powers down」チェックボックスにチェックマークを付けます。
これにより、ロボットは基本モジュールの上部にあるカバーに移動します。
-
「OK」ボタンを押して続行するか、「Cancel」を押して中止してここで終わります。
-
ロボットをロックします。
ロボットをロックする
-
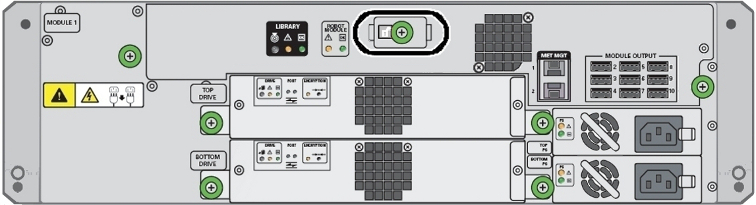
基本モジュールの背面でロボットのロックを見つけます。ロックは、エンクロージャーの上部中央にある緑色のプラスチックのつまみねじです。
-
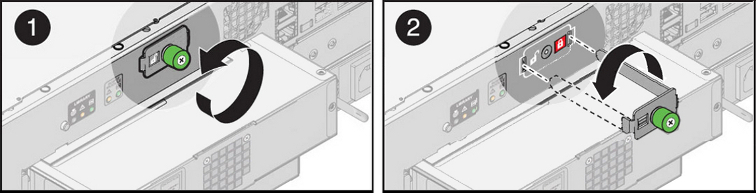
ロックアセンブリ上の脱落防止機構付きつまみねじを緩めます。
-
ロックアセンブリの長い爪が右側のスロットから抜けるまで、ロックアセンブリをシャーシからまっすぐ引き出します。
-
ロックアセンブリを反時計方向に 180 度回転し、長い爪を左側のスロットに差し込みます。ロックアセンブリをシャーシに押し込みます。
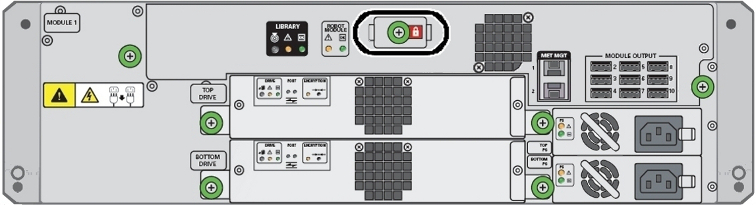
ロックが正しく挿入されたら、ロックアセンブリの右側にある小さい窓に、ロックされた赤い南京錠アイコンが見えます。
-
脱落防止機構付きねじを締めてロックアセンブリを固定します。
-
「Power Down Library」ダイアログに戻り、「I have secured the Robot Lock in the locked position」チェックボックスにチェックマークを付けます。
-
画面上の「OK」ボタンを押してシャットダウンを続行するか、「Cancel」を押して中止します。
ロボットをロック解除する
ロボットをロックする必要のある保守作業が完了したら、通常の稼働を再開する前に必ずロボットをロック解除してください。次の手順に従います。
-
基本モジュールの背面でロボットのロックを見つけます。ロックは、エンクロージャーの上部中央にある緑色のプラスチックのつまみねじです。
-
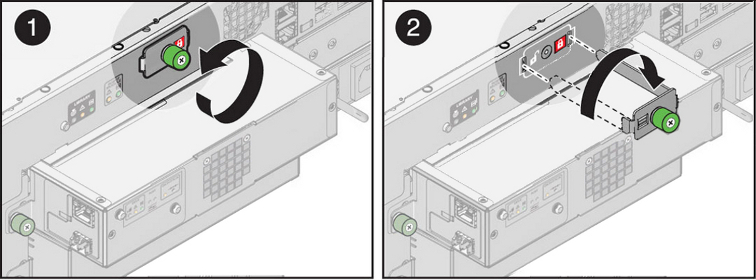
ロックアセンブリ上の脱落防止機構付きねじを緩めます。
-
ロックアセンブリの長い爪が左側のスロットから抜けるまで、ロックアセンブリをシャーシからまっすぐ引き出します。
-
ロックアセンブリを時計方向に 180 度回転し、長い爪を右側のスロットに差し込みます。ロックアセンブリをシャーシに押し込みます。
ロックが正しく挿入されたら、ロックアセンブリの左側にある小さい窓に、ロック解除された白い南京錠アイコンが見えます。
-
脱落防止機構付きねじを締めてロックアセンブリを固定します。