D 중복 전자 부품 개요
선택적 RE(중복 전자 부품) 기능은 라이브러리 컨트롤러에 대한 페일오버 보호를 제공합니다. 라이브러리 컨트롤러 또는 드라이브 컨트롤러에서 오류가 발생할 경우 작업을 대기 컨트롤러로 전환합니다. 카드 케이지의 동일한 면에 설치된 라이브러리 컨트롤러와 드라이브 컨트롤러는 항상 쌍으로 전환됩니다.
RE는 라이브러리가 온라인 상태인 동안 오라클 고객지원센터 담당자가 고장 난 카드를 교체할 수 있도록 하며 펌웨어 업그레이드 중 중단을 최소화합니다.
주:
HBCR에 대한 참조는 HBC도 참조합니다.중복 전자 부품 요구 사항
-
라이브러리 컨트롤러 카드(HBCR) 2개
-
드라이브 컨트롤러 카드(HBT) 2개
주:
ADI 모드를 사용으로 설정하려면 두 카드가 하이 메모리 HBT여야 합니다.매체 검증을 사용 중인 경우 오라클은 모든 카드가 하이 메모리 HBT일 것을 권장합니다.
-
최소 SL8500 펌웨어 버전 FRS_6.00 및 SLC 버전 4.65
-
CLI를 사용하여 사용으로 설정된 하드웨어 활성화 파일
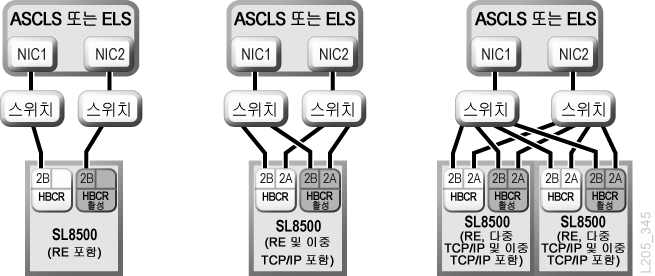
중복 전자 부품 구성 예
각 라이브러리 컨트롤러 카드에는 고유한 IP 주소가 필요합니다. 이중 TCP/IP의 경우 각 카드에는 기본 포트 2B에 대한 주소와 보조 포트 2A에 대한 주소 각 하나씩 고유 IP 주소 2개가 필요합니다. 따라서 RE 및 이중 TCP/IP를 갖춘 라이브러리의 경우 4개의 고유한 IP 주소가 필요합니다.
각 컨트롤러 카드에서 2A 및 2B 포트는 서로 다른 브로드캐스트 도메인에 있어야 합니다. 그러나 활성 카드의 2B 포트와 대기 카드의 2B 포트는 동일한 브로드캐스트 도메인에 있을 수 있습니다. 2A 포트의 경우에도 동일합니다.
참조 항목: 이중 TCP/IP 개요 및 다중 TCP/IP 개요
페일오버 중 발생하는 일
컨트롤러 카드 페일오버 시 활성 라이브러리 컨트롤러는 진행 중인 모든 작업을 완료하려고 시도하며 대기 컨트롤러 카드에 카트리지 데이터베이스를 복사합니다. 데이터베이스를 복사할 수 없는 경우(보통 오류가 갑자기 발생한 경우) 페일오버가 완료된 후 감사를 수행해야 합니다(라이브러리 감사 참조). 라이브러리는 홈 슬롯에 이동 중인 카트리지를 반환합니다. 라이브러리는 반환할 수 없는 카트리지를 호스트 복구를 위한 시스템 슬롯의 홈 슬롯에 배치합니다(호스트 소프트웨어 설명서 참조).
진행 중인 모든 작업이 완료되거나 시간 초과되면 카드는 역할을 전환합니다. 대기 컨트롤러는 활성 상태가 되며, 이전에 활성 상태였던 컨트롤러는 대기 상태로 바뀝니다. 이전 활성 컨트롤러가 대기 소프트웨어를 실행할 수 없는 경우 컨트롤러는 결함 상태에 들어갑니다.
-
테이프 관리 소프트웨어(Symantec 또는 Virtual Storage Manager) 사용자에게는 중단이 나타나지 않습니다.
-
HLI 호스트 응용 프로그램은 페일오버 전환 후 완료를 위해 페일오버 프로세스 중 발생하는 요청을 대기열에 넣습니다. ACSLS의 경우 마운트 및 마운트 해제 요청만 영향을 받습니다(호스트 소프트웨어 설명서 참조).
-
SLC 및 CLI 연결은 종료됩니다. 새 활성 라이브러리 컨트롤러(이전의 대기 컨트롤러)의 IP 주소 또는 DNS 별칭을 사용하여 라이브러리에 대한 연결을 재설정해야 합니다.
RE 전환 방지 요소
-
대기 라이브러리 또는 드라이브 컨트롤러가 결함 또는 꺼내기 상태인 경우
-
대기 코드가 대기 라이브러리 또는 드라이브 컨트롤러 카드에서 실행되고 있지 않은 경우
-
펌웨어 다운로드 또는 카드 초기화가 진행 중인 경우
자동 페일오버를 시작하는 요소
자동 페일오버는 활성 또는 대기 라이브러리 컨트롤러를 통해 시작될 수 있습니다.
활성 라이브러리 컨트롤러는 다음과 같은 경우 자동 페일오버를 시작합니다.
-
파트너 드라이브 컨트롤러 카드가 설치되지 않았거나 통신하고 있지 않은 경우
-
심각한 내부 소프트웨어 오류를 감지한 경우
활성 컨트롤러가 정상적으로 작동하지 않을 경우 대기 라이브러리 컨트롤러가 자동 페일오버를 시작합니다.
수동 페일오버를 시작하는 방법
수동 전환을 시작하기 전에 대기 라이브러리 및 드라이브 컨트롤러가 정상적으로 실행되고 있는지 확인해야 합니다. 다음을 사용하여 수동 전환을 시작할 수 있습니다.
-
호스트 테이프 관리(ACSLS 또는 ELS) — 활성 또는 대기 라이브러리 컨트롤러에서 페일오버를 시작할 수 있습니다. 대기 라이브러리 컨트롤러는
set host path group및force switchoverHLI 요청만 수락합니다. -
SLC — 활성 라이브러리 컨트롤러를 통해서만 페일오버가 시작됩니다(SLC를 사용하여 수동 RE 전환 시작 참조).
-
CLI — 오라클 고객지원센터 담당자는 활성 또는 대기 라이브러리 컨트롤러 중 하나에서 페일오버를 시작할 수 있습니다.
대기 카드를 처음 설치한 후, 펌웨어를 업그레이드한 후 또는 정기적으로 수동 전환을 수행하여 페일오버 기능이 제대로 작동 중인지 확인할 수 있습니다. 드라이브 컨트롤러 없이는 수동으로 라이브러리 컨트롤러를 전환할 수 없습니다. 컨트롤러는 항상 쌍으로 전환되기 때문입니다.
RE를 사용하는 펌웨어 업그레이드
RE 라이브러리에 대한 펌웨어 업그레이드는 라이브러리 작동 중단을 최소화합니다. 라이브러리는 활성 및 대기 컨트롤러 카드와 모든 장치에서 동시에 새 코드를 로드하고 압축을 해제합니다. 그런 다음 라이브러리는 코드를 활성화하고 컨트롤러 및 대부분의 장치를 다시 초기화합니다. 대부분의 경우 라이브러리는 로봇 초기화를 생략합니다.
라이브러리가 재부트될 때까지는 코드 로드, 압축 해제 및 활성화로 인해 라이브러리 작동이 중단되지 않습니다. 재부트 프로세스(10분 정도 걸림) 중 호스트 응용 프로그램(ACSLS 및 ELS)이 모든 마운트 및 마운트 해제 요청을 대기열에 넣습니다. 재부트가 완료되면 대기열에 있는 요청이 라이브러리 컨트롤러로 제출됩니다.
펌웨어 다운로드 및 활성화 정보는 라이브러리 펌웨어 업그레이드를 참조하십시오.