15 ライブラリの保守
ライブラリをオフにする
注意:
次の手順を実行しないでライブラリの電源を切断すると、機器の破損、カートリッジの破損、またはデータの損失の可能性のリスクがあります。-
すべてのライブラリリクエストが完了していることを確認します。
-
ライブラリおよびドライブをオフラインにします。
-
SLC を使用してドライブの状態を検証することによって、ドライブが空であることを確認します (Reports ユーティリティーを使用したライブラリおよびデバイスのレポートの表示を参照してください)。
-
ライブラリの背面のドアを開きます。
-
右下にある配電盤 (PDU) を見つけて、電源スイッチをオフの位置 (0) に設定します。ライブラリが 2N 電源構成を備えている場合は、両方の PDU のスイッチをオフにします。
PDU の詳細については、『SL8500 概要および計画ガイド』を参照してください。
ライブラリをオンにする
-
前面のアクセスドアが閉じていて、ロックされていることを確認します。
注記:
ロボット、CAP、およびエレベータをオンにしない場合は、前面のアクセスドアを開いたままにします。 -
電源スイッチをオンの位置に設定します。
ライブラリが 2N 電源構成を備えている場合は、両方の PDU のスイッチをオンにします。
サービス安全ドアが用意されていないライブラリに入る
-
あらゆる安全上の注意事項に従います (ライブラリ内に入るときの安全上の注意事項を参照してください)。
-
ライブラリをオフラインにします (ライブラリをオフラインにするを参照してください)。
-
必要に応じ、最下部のレールから始めて、邪魔にならないようにロボットを動かしてください。ロボットの機械的または電子的なコンポーネントが損傷しないようにしてください。ロボットは自由に動ける必要があります。移動が制限されている場合、ロボットを強制実行しないでください。
-
ライブラリから退出する前に、ライブラリ内にものが落ちていないか、人が残っていないかを確認します。
-
ドアを閉じてロックします。
-
ドアをロックして、鍵を保持します。
-
ライブラリをオンラインにします (ライブラリをオンラインにするを参照してください)。
ライブラリ内に入るときの安全上の注意事項
警告:
ドアが誤って閉じないように、アクセスドアを開けた状態でロックし、鍵を保持します。
-
ライブラリがオフラインになっていることを確認します。ロボットがオンラインになっている疑いがある場合は、ライブラリ内に入ったり、ロボットを動かしたりしないでください。
-
ライブラリ内の電気的または機械的なすべての安全装置をオーバーライドしようとしないでください。
-
ライブラリに入ろうとしていることを、隣接領域にいる人に知らせます。
-
メカニカルドアリリース (アクセスドアの内側にある黄色のハンドル) を探します。ライブラリ内にいるときにドアが閉じた場合は、メカニカルリリースを押してロックを解除し、ドアを開けてください。
-
ライブラリ内にいるときは、常に両方の前面アクセスドアを開いた状態のままにしてください。
-
ライブラリの物理的な制限について確認してください。体をぶつけたり、アレイに衣服を引っかけたりしないでください (通路のすき間はわずか 0.4 m (18 インチ) です)。
緊急ロボティクス停止スイッチの使用
緊急ロボティクス停止 (EMS) スイッチはロボットへのすべての電源を切断します。
万一、だれかがライブラリ内に閉じ込められ、システムが作動開始するような場合には、ロボットが移動を開始する前に、ライトが 30 秒間点滅します。これにより、ライブラリ外部の人が緊急ロボティクス停止スイッチを押すのに十分な時間が得られます。
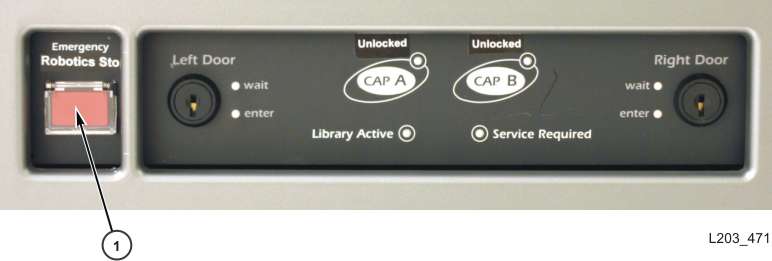
-
緊急ロボティクス停止スイッチ (ERS)
カートリッジの手動マウントとマウント解除
カートリッジを手動でマウントする前に、ドライブのドキュメントを参照してください。
注意:
ドライブの機械的および電子的なコンポーネントには、手を近づけないでください。-
ライブラリ管理ソフトウェアで提供されたボリューム ID、カートリッジの場所、およびドライブスロットを記録します。
-
ドライブを見つけます (Reports ユーティリティーを使用したライブラリおよびデバイスのレポートの表示を参照してください)。L
-
カートリッジを見つけます (カートリッジの検索)。
-
ハブギアが下向きになり、vol-id ラベルが自分側を向くようにカートリッジの方向を合わせます。
-
カートリッジをドライブに押し込みます。カートリッジを無理に押し込まないでください。カートリッジを挿入する際に何らかの抵抗を感じた場合は、ドライブに適したカートリッジタイプを挿入していることを確認します。
-
ドライブをマウント解除するには、ドライブの前面にある「UNLOAD」スイッチを押します。
カートリッジを取り出せない場合は、ドライブのドキュメントを参照してください。
サービス安全ドアの操作
SLC を使用して、安全ドアのステータスをモニターできます (デバイスのステータスおよびプロパティーの表示を参照してください)。
安全ドアは、前面ドアとエレベータ構成部品の背面との間の左または右の領域を一時的に隔離するスライド障壁です。保守担当者は保守鍵を使用して、サービス安全ドアをアクティブ化できます。安全ドアが用意されている場合、保守担当者はライブラリをオフラインにすることなく、前面のドアを開いて障害のあるロボットにアクセスできます。
安全ドアが用意されている場合、ライブラリはホストリクエストの処理を続行します。ライブラリは、保守担当者が作業を完了するまで、安全ドアの隣または背後のスロットに対するあらゆるマウントリクエストをキューに入れます。アクセスドアが閉じられロックされると、サービス安全ドアはライブラリの中央に移動します。続いてロボットがすべてのサービスを再開します。
安全ドアをアクティブ化する前に、保守担当者は、SLC を使用して、左側のエレベータおよび左側の一括 CAP をオフラインにする必要があります。保守活動の完了後、保守担当者は、左側のエレベータおよび一括 CAP をオンラインに戻す必要があります。
安全ドアをアクティブ化する前に、保守担当者は、SLC を使用して、右側のエレベータおよび回転式 CAP または右側の一括 CAP をオフラインにする必要があります。保守活動の完了後、保守担当者は、CAP と右側のエレベータをオンラインに戻す必要があります。